The 8 pins PIC12F683 microcontroller is one of the smallest members of the Microchip 8-bit microcontroller families but equipped with powerful peripherals such as ADC and PWM capabilities. This make this tiny microcontroller is suitable for controlling the DC motor speed. In order to demonstrate the PIC12F683 capabilities and to make this tutorial more attractive, I decided to use the PIC12F683 microcontroller to generate simple and yet fascinating laser light show from a cheap keychain laser pointer.
![Building your own Simple Laser Projector]()
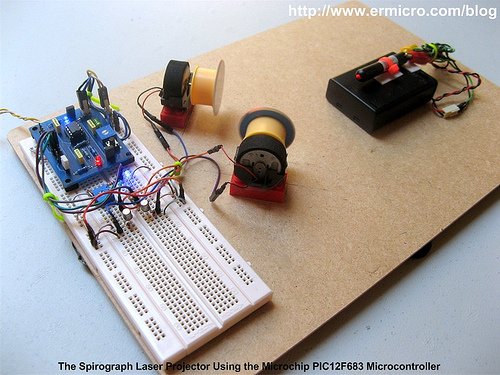
The basic of laser light shown in many entertainments club or park mostly use two method; the first one is to beam the laser shower on the spectators and the second one is to display the laser drawing pattern on the screen. On this tutorial we are going to build the laser projector that displays the spirograph pattern on the screen using the tiny Microchip PIC12F683 microcontroller.
The principle of making the spirograph laser projector is to use at least two DC motors with the attached mirror on it, these mirrors then will deflect the laser beam from one DC motor mirror to the second DC motor mirror and then finally to the screen. By controlling each of the DC motors spinning speed we could generate a fascinating laser spirograph pattern on the screen as shown on this following picture.
The best way to control the DC motor speed is to use the PWM (pulse wave modulation) signal to drive the DC Motor and because we want to change the DC motor speed manually, therefore we need to use the trimport or potentiometer to control each of the DC motors speed. Hmm, this sound like an appropriate job for the microcontroller but could we use this tiny 8 pins PIC12F683 microcontroller to handle this task?
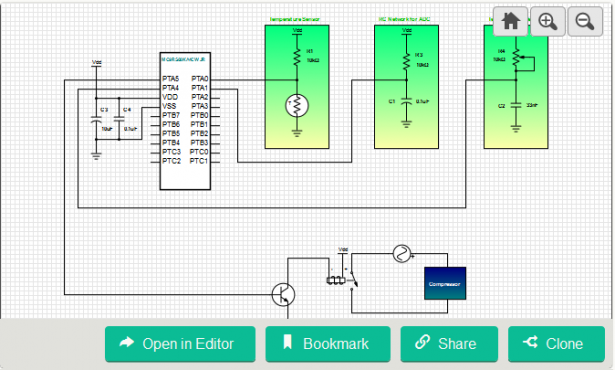
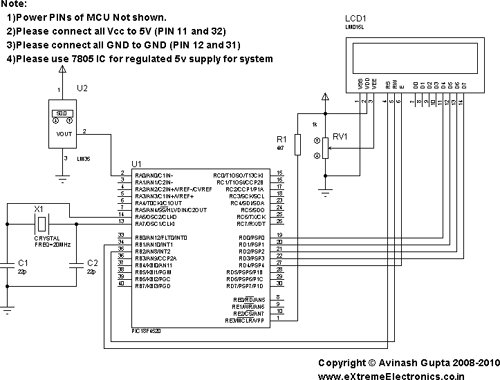
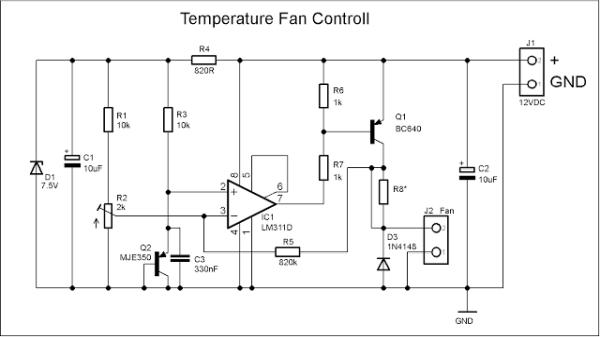
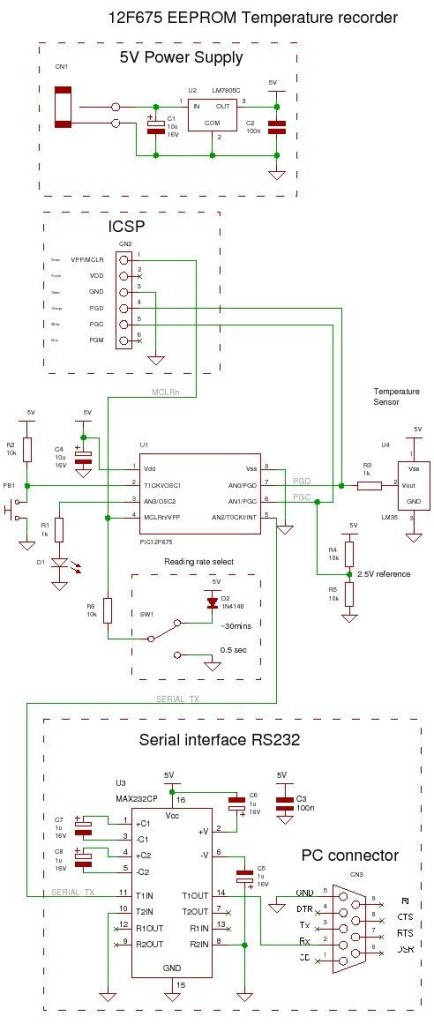
From the datasheet you will notice that the Microchip PIC12F683 microcontroller only has one PWM output (CCP1) and four ADC input channel (AN0, AN1, AN2 and AN3). Because we need two PWM output, therefore instead of using the PIC12F683 microcontroller build in PWM peripheral, in this tutorial I will show you how to generate the PWM signal base on the PIC12F683 microcontroller TIMER0 peripheral. The following is the complete electronic schematic for the laser projector project.
Ok before we go further with the detail; let’s list down the supporting peripherals needed to complete this laser projector project:
- Hot glue gun
- Keychain laser pointer or any available laser pointer
- 3xAA, 4.5 volt battery holder for powering the laser pointer, please use the same voltage rate used by your laser pointer.
- Two DC motor taken from the discarded PS2 Dual shock joystick
- Two toy’s car tire taken from tamiya racing car
- CD/DVD for the mirror, use a kitchen scissor to cut the CD/DVD into the two circle shape mirror with approximately 38 mm in diameter
- Some toys plastic bricks for holding the DC motor
- Breadboard
- Hardboard or acrylic is used for the base of our laser projector
- Double Tape
The following are the electronic parts and the software development tools that I used to make this laser projector project:
- Resistor: 330 (3), 1K (5) and 10K (1)
- Trimport: 10K (2)
- Capacitor: 100nF (2) and 10nF (1)
- One 100uH Inductor
- Two 1N4148 Diodes
- Two Blue and one Red Light Emitting Diode (LED)
- Two 2N2222A transistors
- One Mini Push Button Switch
- One Microchip PIC12F683 Microcontroller
- Microchip MPLAB v8.46 IDE (Integrated Development Environment)
- Microchip Macro Assembler MPASMWIN.exe v5.35, mplink.exe v4.35
- HI-TECH C Compiler for PIC10/12/16 MCUs (Lite Mode) V9.70
- Microchip PICKit3 Programmer (Firmware Suite Version: 01.25.20)
This project is aim as the continuing lessons to my previous posted blog Introduction to PIC Assembly Language Part-1 and Introduction to PIC Assembly Language Part-2, therefore I used the same PIC12F683 board presented in the part 2 which you could down load both of the electronic schematic and the PCB layout designed in Eagle CAD format. The other interesting feature of this laser projector project is; besides the PIC assembly code I also provide the C language version of this project for the C language lover and is compiled with the HI-TECH C Compiler (recently the HI-TECH Software has been acquired by Microchip). This C language version could be used for learning as well as the embedded system programming language comparison.
In this project I also use a new Microchip PICKit3 programmer but of course you could use the Microchip PICKit2 programmer to download the hex code to the PIC12F683 microcontroller flash.
![Building your own Simple Laser Projector using the Microchip PIC12F683]()
The following is the Laser Projector code in PIC Assembly Language:
;******************************************************************************
; File Name : laserlight.asm
; Version : 1.0
; Description : Laser Light Show Project
; Author : RWB
; Target : Microchip PIC12F683 Microcontroller
; Compiler : Microchip Assembler (MPASMWIN.exe v5.35, mplink.exe v4.35)
; IDE : Microchip MPLAB IDE v8.46
; Programmer : PICKit3 (Firmware Suite Version: 01.25.20)
; Last Updated : 01 April 2010
; *****************************************************************************
#include <p12F683.inc>
__config (_INTRC_OSC_NOCLKOUT & _WDT_OFF & _PWRTE_OFF & _MCLRE_OFF & _CP_OFF & _IESO_OFF & _FCMEN_OFF)
#define MAX_TMR0 0xFB
#define MAX_COUNT .200
#define MAX_DEBOUNCE 0x0A
#define MAX_TBLINDEX 0x0A
; Define variables used
cblock 0x20
Delay:2 ; Define two registers for the Delay and Delay + 1
mode ; Operation Mode
pwm_count ; Hold the Main PWM Counter
pwm_m1 ; Hold the PWM width for Motor 1
pwm_m2 ; Hold the PWM width for Motor 2
keycount ; Debounce Count
tableindex ; Table Index for Auto PWM
endc
; Define variable use for storing STATUS and WREG register
cblock 0x70 ; Use unbanked RAM, available both in Bank0 and Bank1
saved_w
saved_status
endc
; Start the Light show Assembler Code here
org 0x00 ; We always start at flash address 0
goto Main ; Jump to Main
org 0x04 ; 0x04: Start PIC Interrupt Address
PIC_ISR: ; Start the PIC Interrupt Service Routine
movwf saved_w ; Save Working Register
movf STATUS,w ; Save Status Register
movwf saved_status
; Check the TIMER0 Interrupt here
btfss INTCON,T0IF
goto ExitISR ; If (T0IF != 1) then Exit ISR
bcf STATUS,RP0 ; Select Registers at Bank 0
incf pwm_count ; pwm_count++
movlw MAX_COUNT
subwf pwm_count,w ; if (pwm_count < MAX_COUNT) then CheckPWM
btfss STATUS,C ; else clear GP1 and GP2
goto CheckPWM
bcf GPIO,GP1 ; GPIO1=0
bcf GPIO,GP2 ; GPIO2=0
goto ExitPWM
CheckPWM:
movf pwm_m1,w
subwf pwm_count,w
btfsc STATUS,Z ; if (pwm_count == pwm_m1) then Set GP1
bsf GPIO,GP1 ; Set GP1 Bit
CheckM2:
movf pwm_m2,w
subwf pwm_count,w
btfsc STATUS,Z ; if (pwm_count == pwm_m2) then Set GP2
bsf GPIO,GP2 ; Set GP2 bit
ExitPWM:
bcf INTCON,T0IF ; clear the TIMER0 interrupt flag
movlw MAX_TMR0
movwf TMR0 ; TMR0 = MAX_TMR0
ExitISR:
movf saved_status,w
movwf STATUS ; Restore STATUS Register
swapf saved_w,f
swapf saved_w,w ; Restore W Register
retfie ; Return from Interrupt
Main:
bsf STATUS,RP0 ; Select Registers at Bank 1
movlw 0x70
movwf OSCCON ; Set the internal clock speed to 8 MHz
movlw 0x39 ; GP1 and GP2 Output, GP0,GP3,GP4 and GP5 as Input
movwf TRISIO ; TRISIO = 0x39
bcf STATUS,RP0 ; Select Registers at Bank 0
movlw 0x07
movwf CMCON0 ; Turn off Comparator (GP0, GP1, GP2)
clrf GPIO
; Now we Set the ADC Peripheral
bsf STATUS,RP0 ; Select Registers at Bank 1
movlw 0x79 ; Set AN0 (GP0) and AN3 (GP4) as Analog Input
movwf ANSEL ; Using the Internal Clock (FRC)
; Now we set the TIMER0 Peripheral
; TIMER0 Period = 1/FSOC x 4 x Prescale x TMR0
movlw 0x00 ; Use TIMER0 Prescaler 1:2, Internal Clock
movwf OPTION_REG ; OPTION_REG = 0x00
bcf STATUS,RP0 ; Select Registers at Bank 0
movlw MAX_TMR0
movwf TMR0 ; TMR0=MAX_TMR0
; Initial the variables used
clrf mode ; Default mode = 0, Light Show Off
clrf pwm_count ; pwm_count = 0
clrf pwm_m1 ; pwm_m1 = 0
clrf pwm_m2 ; pwm_m2 = 0
clrf keycount ; keycount = 0
clrf tableindex ; tableindex = 0
; Activate the Interrupt
bsf INTCON,GIE ; Enable Global Interrupt
MainLoop:
btfsc GPIO,GP5 ; Now we check the Button
goto CheckMode ; if (GP5 != 0) goto CheckMode
movlw 0x01
addwf keycount ; keycount=keycount + 1
movf keycount,w
sublw MAX_DEBOUNCE
btfss STATUS,C ; if (keycount > MAX_DEBOUNCE) goto KeyPressed
goto KeyPressed
goto CheckMode ; else CheckMode
KeyPressed:
clrf keycount ; keycount=0
incf mode ; mode++
movlw 0x03
subwf mode,w ; W = mode - 0x03
btfsc STATUS,C ; if (mode >= 0x03)
clrf mode ; mode=0;
movlw 0x01 ; else check the mode
subwf mode,w
btfss STATUS,C ; if (mode >= 0x01) goto TurnOn
goto TurnOff ; else goto TurnOff
goto TurnOn
TurnOff:
bcf INTCON,T0IE ; Disable TIMER0 Interrupt
clrf pwm_count ; pwm_count = 0
clrf pwm_m1 ; pwm_m1 = 0
clrf pwm_m2 ; pwm_m2 = 0
bcf GPIO,GP1
bcf GPIO,GP2
movlw .250
call DelayMs ; DelayMs(250)
movlw .250
call DelayMs ; DelayMs(250)
goto CheckMode
TurnOn:
bsf INTCON,T0IE ; Enable TIMER0 Interrupt
CheckMode:
movlw 0x01
subwf mode,w
btfss STATUS,Z ; if (mode == 1) goto ShowMode1
goto CheckMode2
goto ShowMode1
CheckMode2:
movlw 0x02
subwf mode,w
btfss STATUS,Z ; if (mode == 2) goto ShowMode2
goto KeepLoop
goto ShowMode2
ShowMode1: ; Used ADC for PWM
movlw B'00000001' ; Left Justify and turn on the ADC peripheral, channel 0 (AN0)
movwf ADCON0 ; Vreff=Vdd
bsf ADCON0,GO ; Start the ADC Conversion on channel 0 (AN0)
btfss ADCON0,GO ; while(GO == 1)
goto $-1 ; Keep Loop
call Delay1ms
movlw B'00000001' ; Left Justify and turn on the ADC peripheral, channel 0 (AN0)
movwf ADCON0 ; Vreff=Vdd
bsf ADCON0,GO ; Start the ADC Conversion on channel 0 (AN0)
btfss ADCON0,GO ; while(GO == 1)
goto $-1 ; Keep Loop
movf ADRESH,w ; Conversion Done, Read ADRESH
movwf pwm_m1 ; pwm_m1 = ADRESH
call Delay1ms
movlw B'00001101' ; Left Justify and turn on the ADC peripheral, channel 3 (AN3)
movwf ADCON0 ; Vreff=Vdd
bsf ADCON0,GO ; Start the ADC Conversion on channel 3 (AN3)
btfss ADCON0,GO ; while(GO == 1)
goto $-1 ; Keep Test
call Delay1ms
movlw B'00001101' ; Left Justify and turn on the ADC peripheral, channel 3 (AN3)
movwf ADCON0 ; Vreff=Vdd
bsf ADCON0,GO ; Start the ADC Conversion on channel 3 (AN3)
btfss ADCON0,GO ; while(GO == 1)
goto $-1 ; Keep Test
movf ADRESH,w ; Conversion Done, Read ADRESH
movwf pwm_m2 ; pwm_m2 = ADRESH
call Delay1ms
goto KeepLoop
ShowMode2: ; Used Predefined Value for PWM
movf tableindex,w
call tablepwm1 ; Call tablepwm1
movwf pwm_m1 ; Assigned it to pwm_m1
movlw .30
call DelayMs ; DelayMs(30)
movf tableindex,w
call tablepwm2 ; Call tablepwm2
movwf pwm_m2 ; Assigned it to pwm_m2
movlw .30
call DelayMs ; DelayMs(30)
incf tableindex ; tableindex++
movlw MAX_TBLINDEX
subwf tableindex,w
btfss STATUS,C ; if (tableindex >= 0x0A) then tableindex = 0
goto KeepLoop
clrf tableindex ; tableindex = 0
KeepLoop:
goto MainLoop ; Goto MainLoop
; Predefined value table for Automatic PWM
tablepwm1:
addwf PCL,f
retlw 0x10
retlw 0x5A
retlw 0x9A
retlw 0x20
retlw 0x40
retlw 0x8A
retlw 0x82
retlw 0x30
retlw 0x58
retlw 0xAA
tablepwm2:
addwf PCL,f
retlw 0x70
retlw 0x8A
retlw 0x2A
retlw 0x30
retlw 0x1C
retlw 0x2A
retlw 0x4B
retlw 0xA0
retlw 0x18
retlw 0x2A
;----------------- DelayMs: Millisecond Delay Subroutine ----------------------
; Paramater: WREG = delay amount in milisecond, max: 255 millisecond
DelayMs:
movwf Delay + 1
DelayLoop:
call Delay1ms
decfsz Delay + 1,f ; Decrease Delay + 1, If zero skip the next instruction
goto DelayLoop ; Not zero goto DelayLoop
return ; return to the caller
;----------------- Delay1ms: 1 ms Delay Subroutine ---------------------------
Delay1ms: ; Total Delay: 1998 x 0.5us ~ 1 ms
movlw 0x99
movwf Delay
DelayLoop1:
decfsz Delay,f ; Decrease Delay, If zero skip the next instruction
goto DelayLoop1
DelayLoop2:
decfsz Delay,f ; Decrease Delay, If zero skip the next instruction
goto DelayLoop2 ; Not zero goto DelayLoop2
DelayLoop3:
decfsz Delay,f ; Decrease Delay, If zero skip the next instruction
goto DelayLoop3 ; Not zero goto DelayLoop2
return ; Return to the caller
end
; EOF: laserlight.asm
The following is the Laser Projector Project code in C Language version:
// ***************************************************************************
// File Name : laserlight.c
// Version : 1.0
// Description : Laser Light Show Project
// Author : RWB
// Target : Microchip PIC12F683 Microcontroller
// Compiler : HI-TECH C PIC10/12/16 MCUs (Lite Mode) V9.70
// IDE : Microchip MPLAB IDE v8.46
// Programmer : PICKit3 (Firmware Suite Version: 01.25.20)
// Last Updated : 03 April 2010
// ***************************************************************************
#include <pic.h>
/* PIC Configuration Bit:
** INTIO - Using Internal RC No Clock
** WDTDIS - Wacthdog Timer Disable
** PWRTEN - Power Up Timer Enable
** MCLRDIS - Master Clear Disable
** UNPROTECT - Code Un-Protect
** UNPROTECT - Data EEPROM Read Un-Protect
** BORDIS - Borwn Out Detect Disable
** IESODIS - Internal External Switch Over Mode Disable
** FCMDIS - Monitor Clock Fail Safe Disable
*/
__CONFIG(INTIO & WDTDIS & PWRTEN & MCLRDIS & UNPROTECT \
& UNPROTECT & BORDIS & IESODIS & FCMDIS);
// Using Internal Clock of 8 MHz
#define FOSC 8000000L
#define MAX_COUNT 200
#define MAX_TMR0 0xFB
#define MAX_DEBOUNCE 0x0A
#define MAX_TBLINDEX 0x0A
unsigned char pwm_count=0;
unsigned char pwm_m1=0;
unsigned char pwm_m2=0;
unsigned char tablepwm1[10]={0x10,0x5A,0x9A,0x20,0x40,0x8A,0x82,0x30,0x58,0xAA};
unsigned char tablepwm2[10]={0x70,0x8A,0x2A,0x30,0x1C,0x2A,0x4B,0xA0,0x18,0x2A};
unsigned char tableindex=0;
/* The Delay Function */
#define delay_us(x) { unsigned char us; \
us = (x)/(12000000/FOSC)|1; \
while(--us != 0) continue; }
void delay_ms(unsigned int ms)
{
unsigned char i;
do {
i = 4;
do {
delay_us(164);
} while(--i);
} while(--ms);
}
static void interrupt isr(void)
{
if(T0IF) { // TIMER0 Interrupt Flag
pwm_count++; // PWM Count Increment
if (pwm_count >= MAX_COUNT) {
pwm_count=0;
GPIO1=0; // Turn off GP1
GPIO2=0; // Turn off GP2
}
if (pwm_count == pwm_m1) {
GPIO1=1; // Turn On GP1
}
if (pwm_count == pwm_m2) {
GPIO2=1; // Turn On GP2
}
TMR0 = MAX_TMR0; // Initial Value for TIMER0 Interrupt
T0IF = 0; // Clear TIMER0 interrupt flag
}
}
void main(void)
{
unsigned char mode,keycount;
OSCCON=0x70; // Select 8 MHz internal clock
/* Initial Port Used */
TRISIO = 0x39; // GP1 and GP2 Output, GP0,GP3,GP4 and GP5 as Input
CMCON0 = 0x07; // Turn off Comparator (GP0, GP1, GP2)
GPIO = 0x00; // Turn Off all IO
/* Init ADC Peripheral */
ANSEL = 0x79; // Set AN0 (GP0) and AN3 (GP4) as Analog Input, Internal Clock
/* Init TIMER0: TIMER0 Period = 1/FSOC x 4 x Prescale x TMR0*/
OPTION = 0b00000000; // 1:2 Prescale
TMR0=MAX_TMR0 ;
/* Init Variable Used */
pwm_count=0;
pwm_m1=0;
pwm_m2=0;
mode=0;
keycount=0;
tableindex=0;
GIE =1; // Enable Global Interrupt
for(;;) {
// Display the LED
if (GPIO5 == 0) {
keycount++;
if (keycount > MAX_DEBOUNCE) {
keycount=0;
mode = mode + 1;
if (mode > 2) mode = 0;
if (mode >= 0x01) {
T0IE = 1; // Enable TIMER0 Interrupt on Overflow
} else {
T0IE = 0; // Disable TIMER0 Intterupt on Overflow
pwm_count=0;
pwm_m1=0;
pwm_m2=0;
GPIO1=0; // Turn off GP1
GPIO2=0; // Turn off GP2
delay_ms(500);
}
}
}
if (mode == 1) {
/* Read the ADC here */
ADCON0=0b00000001; // select left justify result. ADC port channel AN0
GODONE=1; // initiate conversion on the channel 0
while(GODONE) continue; // Wait for ldr_left conversion done
pwm_m1=ADRESH; // Read 8 bits MSB, Ignore 2 bits LSB in ADRESL
delay_ms(1);
/* Read the ADC here */
ADCON0=0b00001101; // select left justify result. ADC port channel AN3
GODONE=1; // initiate conversion on the channel 4
while(GODONE) continue; // Wait for ldr_left conversion done
pwm_m2=ADRESH; // Read 8 bits MSB, Ignore 2 bits LSB in ADRESL
delay_ms(1);
}
if (mode == 2) {
pwm_m1=tablepwm1[tableindex];
delay_ms(10);
pwm_m2=tablepwm2[tableindex];
delay_ms(10);
tableindex++;
if (tableindex >= MAX_TBLINDEX)
tableindex = 0;
}
}
}
/* EOF: laserlight.c */
Generating the PWM (Pulse Width Modulation)
For more detail: Building your own Simple Laser Projector using the Microchip PIC12F683 Microcontroller
The post Building your own Simple Laser Projector using the Microchip PIC12F683 Microcontroller appeared first on PIC Microcontroller.